















If we were guaranteed our GPS would always work, we would not have to do much more for ocean navigation. Unfortunately, we would never know if the GPS was right until the last day of the voyage—and we would be rightfully anxious about that throughout the voyage, because we know this cannot be guaranteed. On the other hand, we can guarantee that the sun will rise tomorrow and the stars will come out tonight, so if we learn celestial navigation, we remove much of this anxiety, as well as learning other valuable skills such as how to check a compass offshore.
But there is always some luck involved in ocean voyaging, just as there is when going to the store to buy a loaf of bread. We cannot guarantee that our own atmosphere won’t get in the way of our seeing the sun and stars when we need them most. We could wait out the overcast to find position and figure the next course, but that is not prudent policy. It could well be that this overcast is the forerunner of a storm we very much want to avoid, so we must keep moving. There are numerous reasons that days of delay could be detrimental.
The way we navigate between true position fixes (from cel nav, GPS or any piloting fix) is called dead reckoning (DR). The name has likely evolved from the abbreviation “ded” for deduced reckoning, although there are those who grope around for an alternative origin. It means navigation by compass and log alone, aided by your knowledge of your boat and the waters you sail. Without actual position fixes, this is the way you carry on. In many senses, the highest goal of navigation training should be learning the skill of accurate DR.
The only way to learn how well you can do DR is to practice it. For this we need a log (odometer), a compass and a logbook. In the learning process we can check our DR with the GPS on any waterway, since many of us do not get to sail in the ocean very often. But that is just to get started. The training must ultimately extend into the ocean because the crucial effects of big waves cannot be learned on inland waters. Also if your local waterway has much tidal current flow, it will have a notable effect on this exercise, but the practice remains invaluable.
The idea is simple—whenever sailing, keep a careful logbook, and periodically compare your DR position to your GPS position. Make a note of the differences (as explained below), then start over again. The more practice you get in various conditions, the more you learn.
Your compass should be checked and deviation removed. A typical binnacle-mounted compass on a non-steel vessel should have no deviation if adjusted properly, but it has to be checked. Your log and knotmeter should be calibrated (in calm air and still water) along a known distance run. The trip log is just another output from the knotmeter. Magnets in the impeller create a pulse each time it turns. The rate of the pulses is converted to speed in knots; the sum of the pulses is converted to distance run in nautical miles. Usually, the software is such that the same calibration process corrects both.
Using a log for distance run is much more accurate than speed multiplied by time since our speed changes continually, especially in big waves. If you want to know your average speed, record the log every hour, then subtract consecutive log readings.
The other key component to DR is the logbook. Make an entry (Time, Course and Log) anytime something changes, and if nothing changes, make an entry every four hours—with an understood policy that no entry means nothing changed. (See “Logbook Procedures,” Blue Water Sailing, Nov 2011.) The logbook will include much information, but the only data we need for DR are: the time of course change, the course we changed to at that time, and the distance run on that course, which we get from subtracting successive log entries.
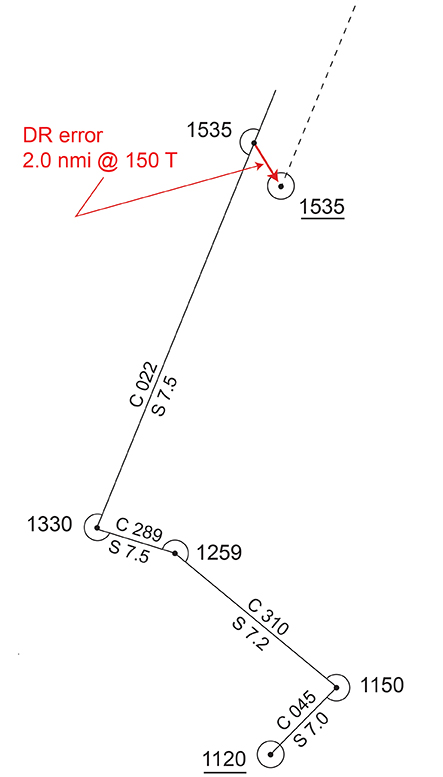
As an example, let us assume we are headed off into the ocean and want to start this voyage with careful monitoring of our DR—the good policy we are recommending here. It is 1535 in the afternoon, and we have our GPS position for that time plotted on the chart. The last recorded position was at 1120 (4h 15m earlier). Then we update the DR track on the chart by plotting out all recorded course changes starting from the 1120 fix position, followed by the final run up to 1535 along the latest course line, and mark that DR position (usually a dot with a half circle). Now measure the range and bearing from the 1535 GPS position to the 1535 DR position. Let’s say it was 2.0 nm in direction 150 T. This is how much our DR was in error.
We now come to the main question at hand. Is this a big error or not? In other words, how well can we hope to do DR in the ocean? This is the key factor we need to know so we understand how our position uncertainty is increasing with time, which it inevitably will, when we are out of sight of land. The best next route to follow obviously depends on where we are now, but the best choice could also depend on how uncertain this starting point is. The more uncertain our present position, the more conservative our next route must be.
There are various ways to approach this. We studied this subject in depth when preparing the book Emergency Navigation (1980 to 1986). Details can be found in that text along with the analysis of several ocean passages, log entry by log entry. We are talking log and compass here, so nothing has really changed in the intervening 30 years, except that we started out with nothing but cel nav for a reference, then we had Loran, then we had Transit SatNav, and now we have GPS; still, the key to good navigation and record keeping has not changed. In fact, the notable thing about Christopher Columbus—other than being a charlatan and one of the few nominally educated people of the time who did not know the radius of the earth—was his exceptional ability at DR. With nothing more than a chip log for speed, a sand glass for time, and a compass he did not understand at all, he still knew remarkably well where he was at all times (relative to his departure) based on his DR skills.
The rules of thumb we came up with are based on two things: how far you traveled and how long it took. Assuming your instruments are calibrated and you do everything right, you still have to assume that your DR position is growing uncertain in time by some 5% of the total distance run and the effect of an unknown error current of some 0.5 kts. We must consider both factors when estimating our DR uncertainty. Often one factor will dominate the other, and we can then focus on it. If they are about the same, then we might consider the total error as about 1.5 times their average.
This guideline says if you go out in the ocean, turn the engine off and take all sails down, your position will become uncertain as if you were in a current of some 0.5 kts in a direction you do not know. After 24 hours you have to assume you could be anywhere within 12 nm of where you think you are—maybe worse in some cases, maybe not so bad in others. This conclusion is based on wind drift studies, along with noting that the average ocean surface current flow around the world is some 0.5 kts as well.
Note that Pilot Chart current data should be interpreted as about ± 50%. A reported drift of 12 miles a day could be anywhere between six and 18, with the higher estimate more likely if the wind has blown in the predicated current direction for several days, and the lower estimate if the wind has blown the opposite direction for several days.
Likewise if you zoom off at 30 kts, after you go 100 miles your DR position will be uncertain by some five miles or so—again, maybe a bit more or bit less depending on many factors. In this case the current drift of 1.7 nm (0.5 x 3.3h) is small enough that it could be neglected, because the errors add as the square root of the sum of the squares.
Though developed for ocean navigation, the limits given are a good guideline for all sailing, even across a large lake. Namely, without a real position fix, your DR position becomes uncertain by 5% of distance run within an error current of 0.5 kts.
In your practice underway, if you consistently do better than that, you are doing fine. If you cannot achieve that on average, then you are not optimized on your procedures or equipment.
To get a feeling for the magnitudes of these limits, note that a 6° right triangle has sides in the ratio of 1 to 10, and this proportion scales down forever and up to some 18°. That is, a 3° triangle has sides of about 1 to 20; a 12° triangle has sides of about 1 to 5, and so on. It is a powerful trick for navigators to know, with numerous applications.
Put into the context at hand, after you sail 100 nm with a compass that is wrong by 6°, you will be off your intended track by 10 nm. This is a 10% error; we are talking in our DR error estimates of 5%. So you can see that 5% DR is quite a good goal. Namely, it means you are steering what you record to within ±3°, with a log that is exactly right.
As for the log, when we strive for 5% we imply an indicated knotmeter speed of 7.0 is guaranteed to be right to within about 0.35 kts. This is a conservative goal, which is easy to achieve with calibration, so we see the main factor in DR accuracy is usually course made good.
The saving grace, meaning why this is not quite as difficult as it might appear, is we are assuming we have taken all systematic errors into account, i.e. we correct for compass error, current, leeway and helm bias as best we can. In this case, our errors are random and could be just as well to the left as to the right, so they tend to cancel.
Those errors that do not cancel, but in fact show up consistently, provide valuable information. If, for example, regardless of tack or gibe, we find ourselves set to the south as if we were in a current of 0.3 kts, then we have learned that whatever estimates we have made for the current were off by that amount. Then we can add this to our subsequent corrections. Likewise, compass or log errors will show up as a consistent offset, which can likewise then be accounted for.
Sailing into the wind, you will find that your progress to weather will not be what you expect. The logged distance run will be about right, but your track will be offset downwind some 5° to 10° from what you expected, even with an estimated leeway correction—and it might not be the same on each tack, depending on the waves.
In any event, this type of analysis of comparing your fix positions with the corresponding DR positions and thinking in terms both percentage of distance run and an error current will help you unravel what is ailing your DR and prepare you for a time when you might not have the fixes to fall back on.
(caption for photo above:Sample DR track plot. Based on the sample logbook, we start from a fix and 1120 and plot all course changes recorded in the logbook until the next fix at 1535. The difference between 1535 DR and fix (shown in red) is the DR error, 2.0 nmi in direction 150. By standard convention, fixes are plotted with full circles; DR positions with half circles. Each leg is labeled with course and speed. After 1535, the old DR track is abandoned and a new one started (dotted line)).
David Burch is the director of Starpath School of Navigation, which offers online courses in marine navigation and weather atwww.starpath.com. He has written eight books on navigation and received the Institute of Navigation’s Superior Achievement Award for outstanding performance as a practicing navigator.